







Règle à gauche, règle à droite, règle à vis à droite.La règle de la main gauche, c'est la base de l'analyse de la force de rotation du moteur.En termes simples, c'est le conducteur porteur de courant dans le champ magnétique qui sera affecté par la force.
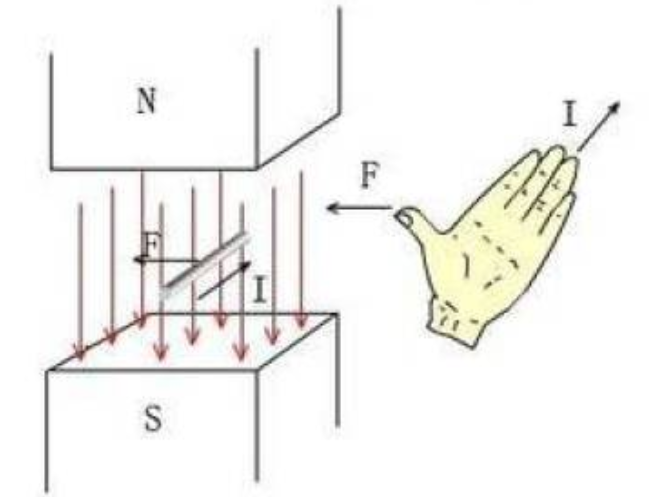
Laissez la ligne de champ magnétique passer par l'avant de la paume, la direction des doigts est la direction du courant et la direction du pouce est la direction de la force magnétique.La traction de la force coupe les lignes de champ magnétique pour générer une force électromotrice.
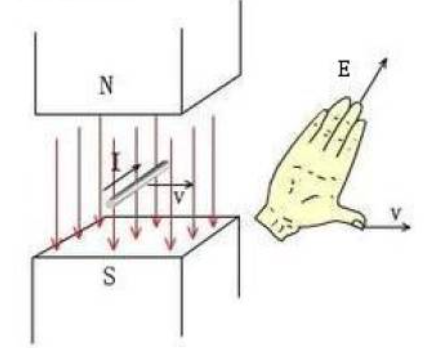
Laissez la ligne de champ magnétique traverser la paume, la direction du pouce est la direction du mouvement et la direction du doigt est la direction de la force électromotrice générée.Pourquoi parler de force électromotrice induite ?Je ne sais pas si vous avez une expérience similaire.Lorsque vous combinez les fils triphasés du moteur et que vous faites tourner le moteur à la main, vous constaterez que la résistance est très importante.En effet, l'induction se produit lors de la rotation du moteur.La force électromotrice génère du courant, et le courant traversant le conducteur dans le champ magnétique générera une force opposée au sens de rotation, et tout le monde sentira qu'il y a beaucoup de résistance à la rotation.
Les fils triphasés sont séparés et le moteur peut être tourné facilement
Les lignes triphasées sont combinées et la résistance du moteur est très grande.Selon la règle de la vis à droite, tenez le solénoïde sous tension avec la main droite, de sorte que les quatre doigts soient pliés dans le même sens que le courant, puis l'extrémité pointée par le pouce est le pôle N du solénoïde sous tension.
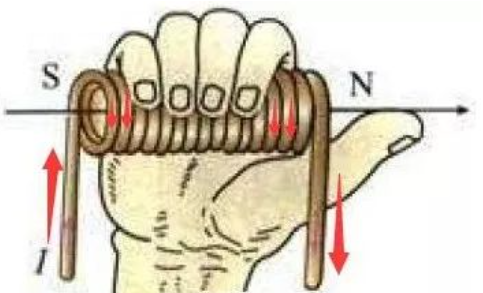
Cette règle est la base pour juger de la polarité de la bobine sous tension, et la direction de la flèche rouge est la direction du courant.Après avoir lu les trois règles, examinons les principes de base de la rotation du moteur.La première partie: modèle de moteur à courant continu Nous trouvons un modèle de moteur à courant continu qui a été étudié en physique au lycée et effectuons une analyse simple grâce à la méthode d'analyse du circuit magnétique.
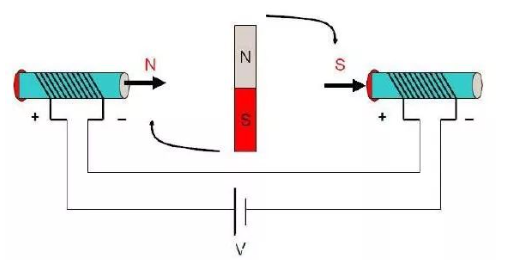
État 1 Lorsque le courant est appliqué aux bobines aux deux extrémités, selon la règle de la vis à droite, une intensité d'induction magnétique appliquée B (comme indiqué par la flèche épaisse) sera générée, et le rotor au milieu essaiera de faire la direction de sa ligne d'induction magnétique interne autant que possible.La direction de la ligne de champ magnétique externe est cohérente pour former une boucle de ligne de champ magnétique fermée la plus courte, de sorte que le rotor interne tourne dans le sens des aiguilles d'une montre.Lorsque la direction du champ magnétique du rotor est perpendiculaire à la direction du champ magnétique externe, le couple de rotation du rotor est le plus grand.Notez que le "moment" est dit être le plus grand, pas la "force".Il est vrai que lorsque le champ magnétique du rotor est dans la même direction que le champ magnétique externe, la force magnétique sur le rotor est la plus grande, mais à ce moment le rotor est dans un état horizontal et le bras de force est 0, et de Bien sûr, il ne tournera pas.Pour ajouter, le moment est le produit de la force et du bras de force.Si l'un d'eux est nul, le produit est nul.Lorsque le rotor tourne en position horizontale, bien qu'il ne soit plus affecté par le couple de rotation, il continuera à tourner dans le sens des aiguilles d'une montre en raison de l'inertie.À ce moment, si la direction du courant des deux solénoïdes est modifiée, comme indiqué dans la figure ci-dessous, le rotor continuera à tourner.tourner vers l'avant dans le sens des aiguilles d'une montre,
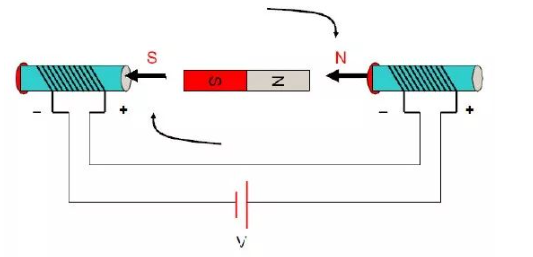
Dans l'état 2, la direction du courant des deux solénoïdes est constamment modifiée et le rotor interne continuera à tourner.Cette action de changer le sens du courant s'appelle la commutation.Remarque : le moment de commuter n'est lié qu'à la position du rotor et n'est pas directement lié à une autre quantité.Partie 2 : Moteur triphasé à rotor interne bipolaire D'une manière générale, les enroulements triphasés du stator ont un mode de connexion en étoile et un mode de connexion en triangle, et le « mode de conduction deux-deux de connexion en étoile triphasée » est le plus couramment utilisé, qui est utilisé ici.Ce modèle est utilisé pour une analyse simple.
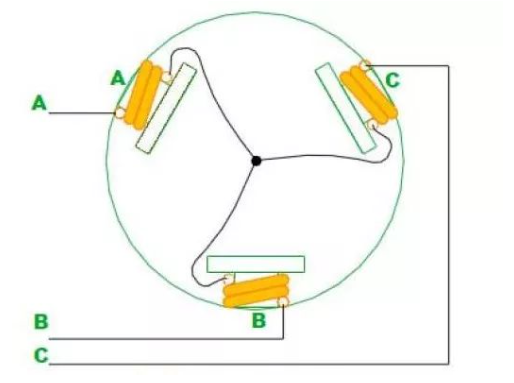
La figure ci-dessus montre comment les enroulements du stator sont connectés (le rotor n'est pas représenté comme un hypothétique aimant bipolaire), et les trois enroulements sont connectés ensemble en forme de « Y » via le point de connexion central.L'ensemble du moteur aboutit à trois fils A, B, C. Lorsqu'ils sont alimentés deux à deux, il y a 6 cas, à savoir AB, AC, BC, BA, CA, CB.Notez que c'est dans l'ordre.
Maintenant, je regarde la première étape : la phase AB est alimentée
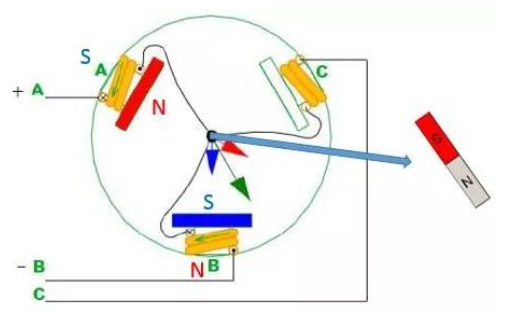
Lorsque la phase AB est alimentée, la direction de la ligne de champ magnétique générée par la bobine du pôle A est indiquée par la flèche rouge, et la direction de la ligne de champ magnétique générée par le pôle B est indiquée par la flèche bleue, puis la direction de la force résultante est indiquée par la flèche verte, puis en supposant qu'il y a un aimant bipolaire, la direction du pôle N coïncidera avec la direction indiquée par la flèche verte selon "le rotor au milieu essaiera de garder le direction de ses lignes de champ magnétique interne cohérente avec la direction des lignes de champ magnétique externes ».Quant à C, il n'a rien à voir avec lui pour le moment.
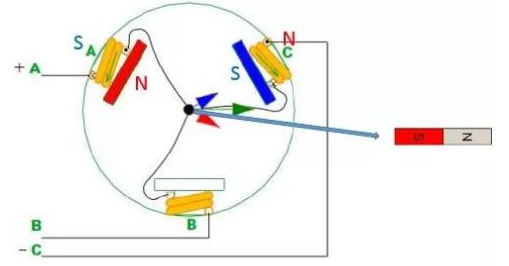
Étape 2 : Phase CA sous tension
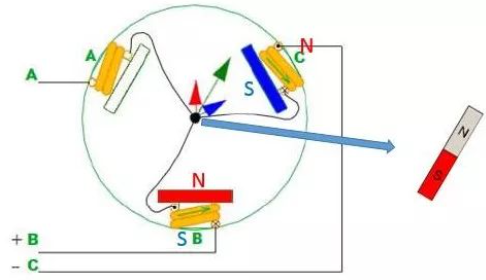
La troisième étape : l'électrification en phase BC
La troisième étape: la phase BA est alimentée
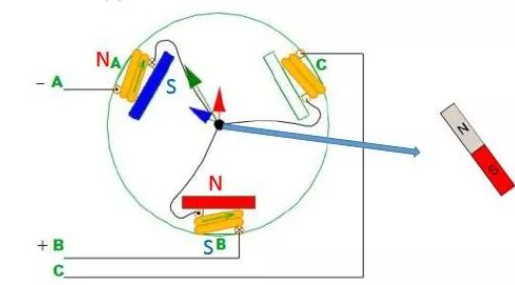
Voici le diagramme d'état de l'aimant intermédiaire (rotor): Chaque rotor de processus tourne de 60 degrés

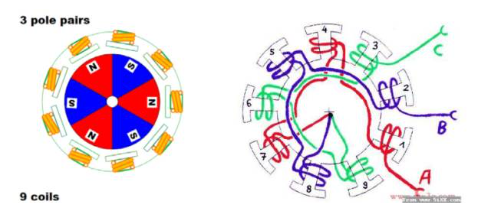
La rotation complète est effectuée en six processus, dont six commutations sont effectuées.La troisième partie : moteur triphasé à rotor interne multipolaire à enroulements multiples Examinons un point plus compliqué.La figure (a) est un moteur triphasé à neuf enroulements à six pôles (triphasé, neuf enroulements, six pôles).Pôle opposé) moteur à rotor interne, sa connexion d'enroulement est illustrée à la figure (b).On peut voir sur la figure (b) que les enroulements triphasés sont également connectés ensemble au point intermédiaire, qui est également une connexion en étoile.D'une manière générale, le nombre d'enroulements du moteur est incompatible avec le nombre de pôles de l'aimant permanent (par exemple, on utilise 9 enroulements et 6 pôles au lieu de 6 enroulements et 6 pôles), de manière à éviter que les dents du stator et du aimants du rotor de s'attirer et de s'aligner.
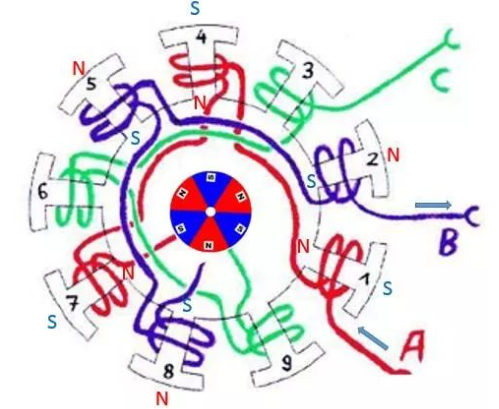
Le principe de son mouvement est le suivant : le pôle N du rotor et le pôle S de l'enroulement sous tension ont tendance à s'aligner, et le pôle S du rotor et le pôle N de l'enroulement sous tension ont tendance à s'aligner.Autrement dit, S et N s'attirent.Notez qu'elle est différente de la méthode d'analyse précédente.Eh bien, nous allons vous aider à l'analyser à nouveau.La première étape : la phase AB est électrifiée
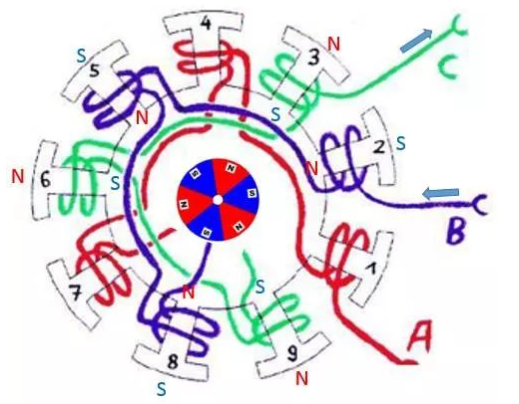
Étape 2 : Phase CA sous tension

La troisième étape : l'électrification en phase BC
Heure de publication : 21 octobre 2022